一个初学者眼中的动力系统
低阶连续系统的基础概念
动力系统简介
动力系统为研究随时间变化(动态)提供了一个数学框架。这篇博客旨在介绍用于分析一维和二维系统的基本概念和工具。
当我刚开始接触动力系统的时候,我感到非常困惑。我们已经有笛卡尔空间、偏微分方程(PDE)和常微分方程(ODE)来描述笛卡尔空间中的轨迹——那么为什么还需要相空间?笛卡尔空间还不够吗?
随着对动力系统的深入学习,我意识到仅使用笛卡尔空间来描述动态的局限性:它缺乏时间信息,也许这正是动力系统中“动力”一词的意义所在。
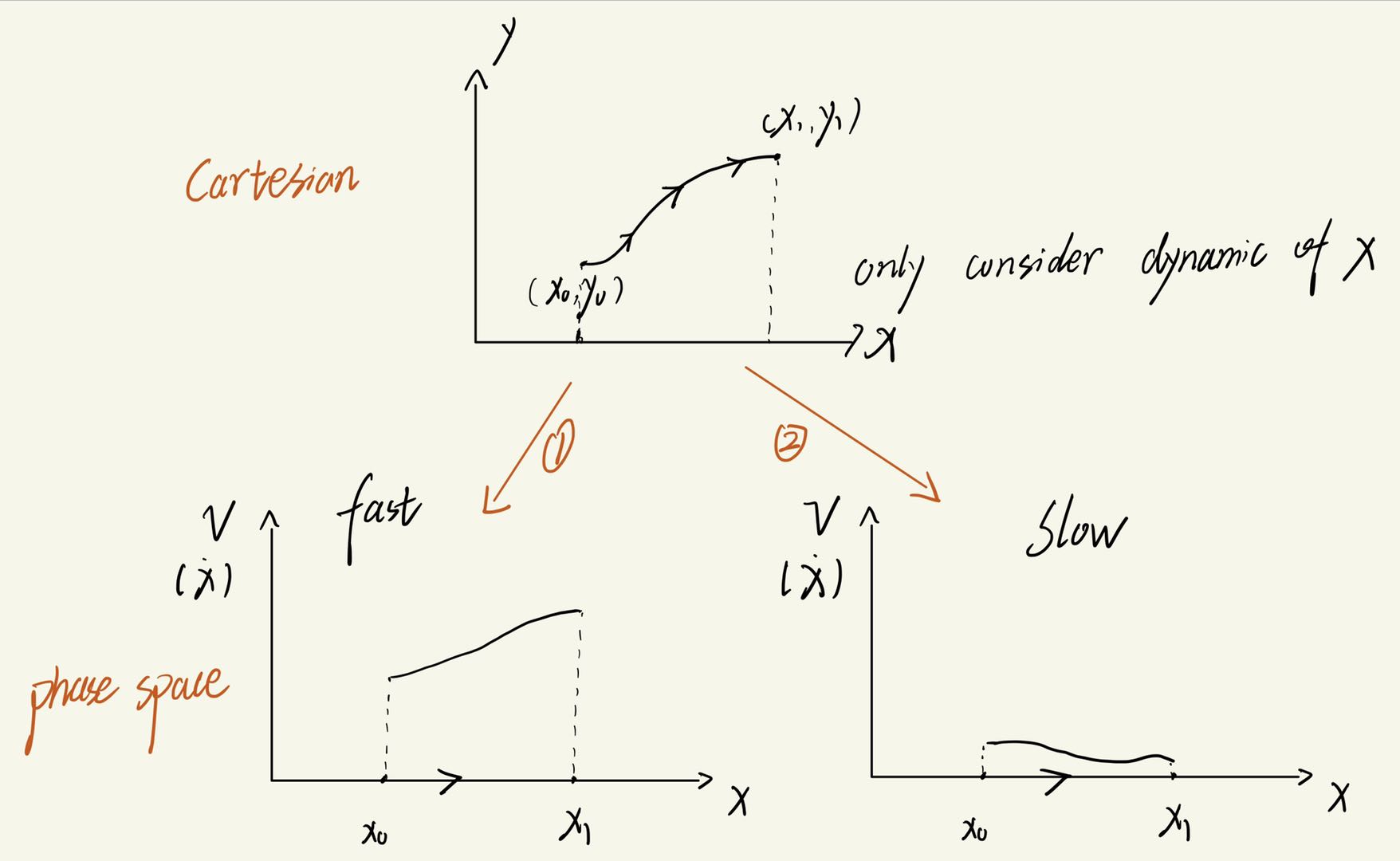
请看上图,显示了二维笛卡尔空间中的一条轨迹。一点从 $(x_0,y_0)$ 移动到 $(x_1,y_1)$。虽然我们可以看到点所经过的路径,但却无法得知点沿着这条路径移动的速度。单独的轨迹无法揭示系统的速度或其随时间的演变。
这正是相空间的重要性所在。通过转到相空间,我们不仅可以可视化系统的位置,还可以同时表示每一点的速度(或其他的物理量,取决于上下文)。例如,在相空间中,我们可以用 $x$ 和其速度 $v=\dot{x}$ 来表示系统的状态。这让我们能更清晰地观察整个系统随时间的演化。
相空间中的图 1 和图 2 说明了两个不同的运动方式可以在笛卡尔空间中共享相同的轨迹。
通过在每个位置可视化速度,相空间提供了一个更丰富、更完整的系统行为图景。它成为研究轨迹如何变化、识别固定点、极限环或混沌行为等模式以及理解系统整体动态的强大工具。
1. 一维流
让我们从一维系统开始。你可能会在动力系统中遇到的第一个不熟悉的符号是 $ \dot{x} $。但别担心,这只是 $\frac{dx}{dt}$ 的另一种表示方式。通常,我们将其表示为 $ \dot{x}= f(x) $,这意味着对于 $x$ 的每个值,系统都有一个对应的变化率 $\frac{dx}{dt}= f(x)$。例如,如果 $x$ 表示位置,那么 $ \dot{x}= f(x) $ 描述了该特定位置的速度。
1.1 固定点(fixed point)
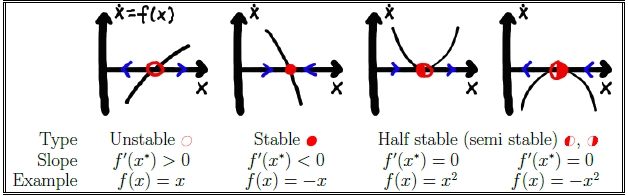
- 定义:系统随时间不变化的点 $ \dot{x} = 0 $。
- 简单系统中固定点的示例,我们可以看到$x$轴上的箭头代表了该点的运动方向,因此这是为什么我们将相空间中的轨迹称之为流的原因,其本质是一个向量场,只不过在一维系统中只有两个方向因此感觉不是那么明显。
1.2 线性稳定性分析
这是一个非常有用的技巧,用于展开固定点附近的流,从而可以观察高阶项如何决定固定点附近的行为。 对于一般流 $ \dot{x} = f(x) $,可以在任意固定点 $ x = x^* $ 附近求解。固定点的小偏差 $ \eta(t) = x(t) - x^* $ 化简如下: \(\dot{\eta} = \dot{x} - \frac{d}{dt} x^* = \dot{x} = f(x)\)
将流展开到固定点的线性阶次: \(\dot{\eta} = f(x) = \underbrace{f(x^*)}_{=0} + f'(x^*) \underbrace{(x - x^*)}_{=\eta} + \frac{1}{2} f''(x^*) \underbrace{(x - x^*)^2}_{=\eta^2} + \cdots\)
\[\approx f'(x^*) \eta\]由于 $f(x^*) = 0 $(根据固定点的定义 $ \frac{d}{dt}x^*=0 $),解为: \(\eta = \eta_0 e^{f'(x^*)t}\)
稳定性指数:$\lambda = f’(x^*)$ 是稳定性指数,决定了固定点是稳定($\lambda < 0$)还是不稳定($\lambda > 0$)。
注意! 稳定性指数不是 $\lambda = \ddot{x}$。这是错误的,因为 $\ddot{x} = \frac{d^2 x}{dt^2}$,而稳定性指数是 $ \dot{x} $ 相对于坐标 $ x $ 的导数,即 $ \lambda \equiv \frac{\partial \dot{x}}{\partial x} $。
1.3 一维系统中的分岔理论
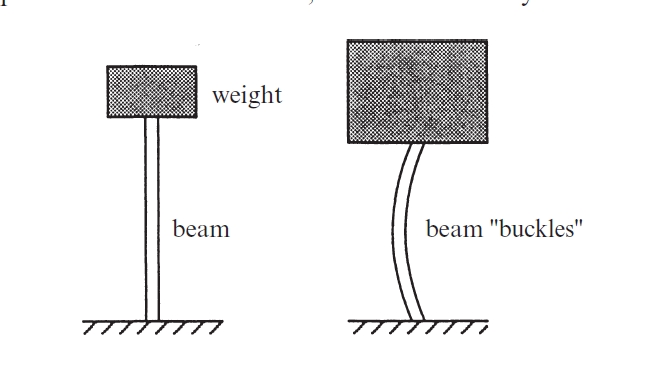
什么是分岔? 分岔是动力系统随参数变化而发生的系统性的改变。想象一个重物放在一根杆子上。当箱子的重量改变时,杆子平衡时候的弯曲度也会改变。然而,如果我们不断增加箱子的重量,当重量超过杆子可以承受的重量之后,杆子就会断裂。这个断裂点表示箱-杆系统的一个分岔:在这个点之后,无论箱子的重量如何,杆都无法恢复到任何稳定状态的弯曲度。
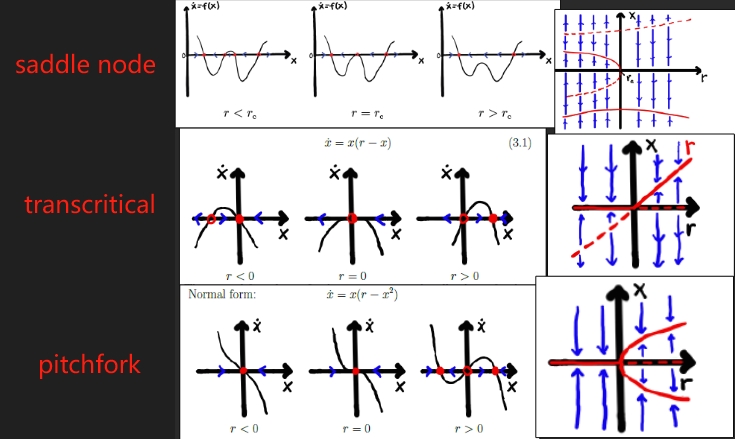
- 单参数分岔:
- 鞍结分岔(saddle node bifurcation)。
- 横贯分岔(transcritical bifurcation)。
- Pitchfork 分岔(超临界和亚临界)。
- 双参数分岔:
- 在具有两个参数 $r$ 和 $s$ 的系统中,$ \dot{x} = f(x, r, h)$,固定点形成一个曲面
$x^*(r, h)$,曲面上的所有点是 $\dot{x}=0$ 的地方,因此这个曲面也称为平衡流形,而分岔发生在曲线 $h_c (r)$ 处。
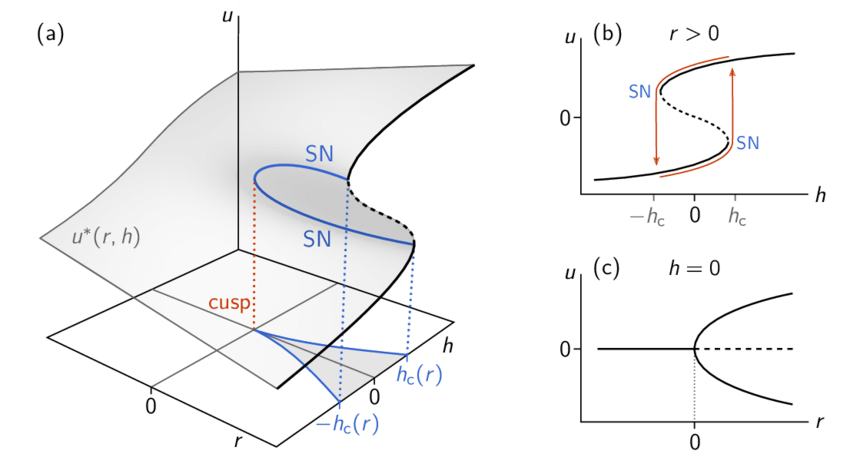
- 突变(catastrophe):参数的微小变化可能导致系统平衡状态的显著变化。
- 滞后现象(hysteresis):在 $xoh$ 平面中的环状结构被称为滞后环(hysteresis loop)。在 $h_c$ 附近微小的 $h$ 改变可能导致显著的平衡状态变化,而如果系统希望回到之前的平衡状态,$h$ 必须先调整到 $-h_c$,然后再缓慢返回 $h_c$。
- 在具有两个参数 $r$ 和 $s$ 的系统中,$ \dot{x} = f(x, r, h)$,固定点形成一个曲面
$x^*(r, h)$,曲面上的所有点是 $\dot{x}=0$ 的地方,因此这个曲面也称为平衡流形,而分岔发生在曲线 $h_c (r)$ 处。
2. 平面上的流
平面上的流比一维流更为有趣,因为它展现了更丰富的全局结构。除了单一的固定点,还可能出现诸如闭轨道(closed orbits)、极限环(limit cycles)(孤立的闭轨道)、同宿轨道(homoclinic orbits)或异宿轨道(heteroclinic orbits)等现象。
2.1 二维系统中的固定点
- 使用线性稳定性分析分类:对于二维系统,我们首先确定其雅可比矩阵。在我们想分析的固定点附近,我们通过线性近似研究该点附近的运动趋势。
固定点可以分类如下:
- 稳定/不稳定螺旋。
- 稳定/不稳定节点。
- 中心。
- 退化点。
通过参考固定点的分类图,我们可以通过雅可比矩阵的迹和行列式快速确定固定点的类型。
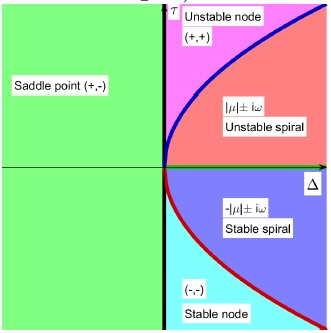
对于一个二维系统:
\(\dot{x} = Ax \, , \, A = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \, .\)
根据特征方程 $0 = \det(A - \lambda I) = \lambda^2 - \tau\lambda + \Delta$(其中 $\tau = a + d$也就是 迹 $\Delta = ad - bc$ 也就是行列式),我们可以得到系统的特征值。
为什么我们关心系统的特征值?因为它们使我们能够将系统变换到特征向量张成的空间。这简化了分析,我们可以专注于特征值如何决定系统在固定点附近的行为。如果特征值的实部大于 0,系统将在相应的特征向量方向上指数增加。相反,如果特征值的实部小于 0,系统将在该方向上指数收缩。
下方的证明表明,特征值在解轨迹中充当指数因子,解释了指数扩展和收缩的来源。
$$ \dot{x}=Ax = PDP^{-1}x \\ \Rightarrow \frac{d}{dt}[P^{-1}x] = D \underbrace{P^{-1}x}_{\xi} \\\Rightarrow \dot{\xi} = D\xi \\ \Rightarrow \xi(t) = \begin{pmatrix} e^{\lambda_1 t} \xi_1(0) \\ e^{\lambda_2 t} \xi_2(0) \end{pmatrix}$$
当我第一次学习这一点时,我感到迷惑的点是为什么 0 是阈值而不是 1。我最初认为反复将矩阵应用于一个给定向量会使该向量在 $|\lambda|>1$ 的方向上增长,而在 $|\lambda|<1$ 的方向上收缩。
我的误解是源于矩阵并不是直接应用于物理实体,而是作用在相空间中,特别是对 ODE 系统。当我们求解 ODE 系统以获得解时,$\lambda$ 表示指数而不是乘数因子!
而当特征值为复数时,振荡现象出现了!,解的形式如下: \(\xi(t) = \xi_1(0) e^{\mu t} \begin{pmatrix} \cos(\omega t) \\ \sin(\omega t) \end{pmatrix}\) 其中 $\mu$ 是特征值的实部,$\omega$ 是其虚部。
2.2 非局部结构
到目前为止,我们仅讨论了系统在特定点(即固定点)周围的局部行为。然而,在二维系统中,还会出现新结构,例如闭轨道和极限环。
- 哈密顿系统中的闭轨道:
- 守恒定律导致闭轨道的出现。
- 像这样的简单哈密顿系统可以在相空间平面中形成闭轨道。想象围绕中心的一组闭轨道,这些轨道表示在相同的起始位但是拥有不同的初始速度。
- 哈密顿系统的数学形式如下:
$$ H \equiv \frac{p^2}{2m} + V(x) \\ \dot{x} = \frac{\partial H}{\partial p} = \frac{p}{m} \\ \dot{p} = -\frac{\partial H}{\partial x} = -\frac{\partial V}{\partial x} \\$$
这里,$x$ 通常表示位置,而 $p$ 表示动量,定义为 $p=mv$。因此,总能量 $E=H(x,p)$ 是守恒的,因为 $\dot{H}=0$,即总能量随时间不会改变。
$$\dot{H} = \frac{\partial H}{\partial x} \underbrace{\dot{x}}_{\frac{\partial H}{\partial p}} + \frac{\partial H}{\partial p} \underbrace{\dot{p}}_{-\frac{\partial H}{\partial x}} = 0.$$
-
极限环:
在没有对称性的系统中,闭轨道的带状结构是罕见的,因为非线性通常会破坏这种完美的对称结构。然而,孤立的闭轨道(即极限环)仍然可能通过振荡的方式出现。
使用极坐标分析圆形结构通常更容易,典型的表示如下:
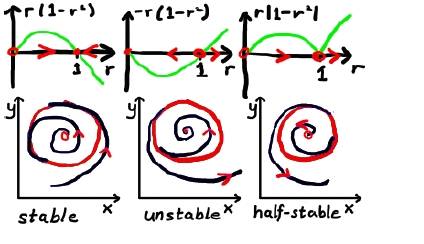
- 如何找到极限环:
- 庞加莱-本迪克森定理:假设在平面中存在一个光滑的、有界的区域 $D$。进一步假设 $D$ 中不包含任何固定点,并且存在一条始终局限于 $D$ 的轨迹。那么在 $D$ 中至少存在一个周期轨道。
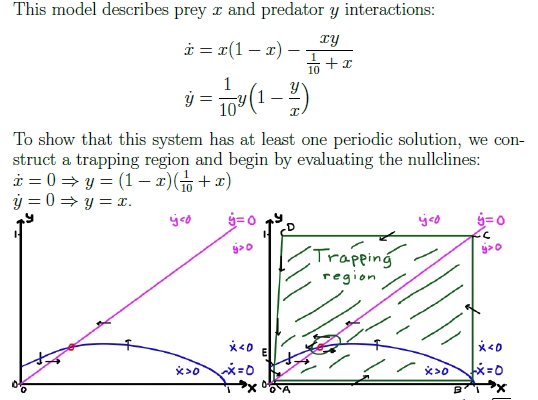
- 庞加莱-本迪克森定理:假设在平面中存在一个光滑的、有界的区域 $D$。进一步假设 $D$ 中不包含任何固定点,并且存在一条始终局限于 $D$ 的轨迹。那么在 $D$ 中至少存在一个周期轨道。
- 如何排除闭轨道或极限环:
- 梯度系统:$\dot{x} = - \nabla V(x)$,在梯度系统中,$x$ 总是朝着使总能量 $V$ 最快减少的方向移动,因此不会出现振荡。
- Dulac 判据:考虑一个可微函数 $V(x)$,使得 $\nabla \cdot (V\dot{x})$ 在某个区域内不改变符号。如果这样的函数存在,则该区域内没有闭轨道(格林定理)。
- 指数理论:极限环的指数始终为 +1。因此,如果某条闭曲线的指数为 −1,并且我们可以确认该区域内仅存在一个固定点,则可以明确排除区域内存在极限环的可能性。(这只是排除极限环的众多规则之一。)
- 如何找到极限环:
2.3 极限环的分岔
- 极限环的鞍结分岔:只需改变参数 $r$,极限环就会在相空间中出现!
- SNIPER(鞍结无限周期)分岔:调整角速度 $\omega$,直到某一点固定点恰好出现在极限环上。

- 同宿分岔:极限环与鞍点发生碰撞!
2.4 平面分岔
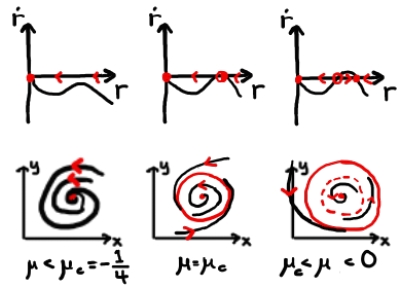
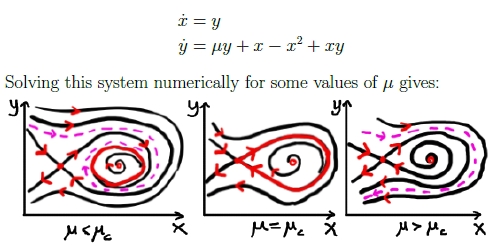
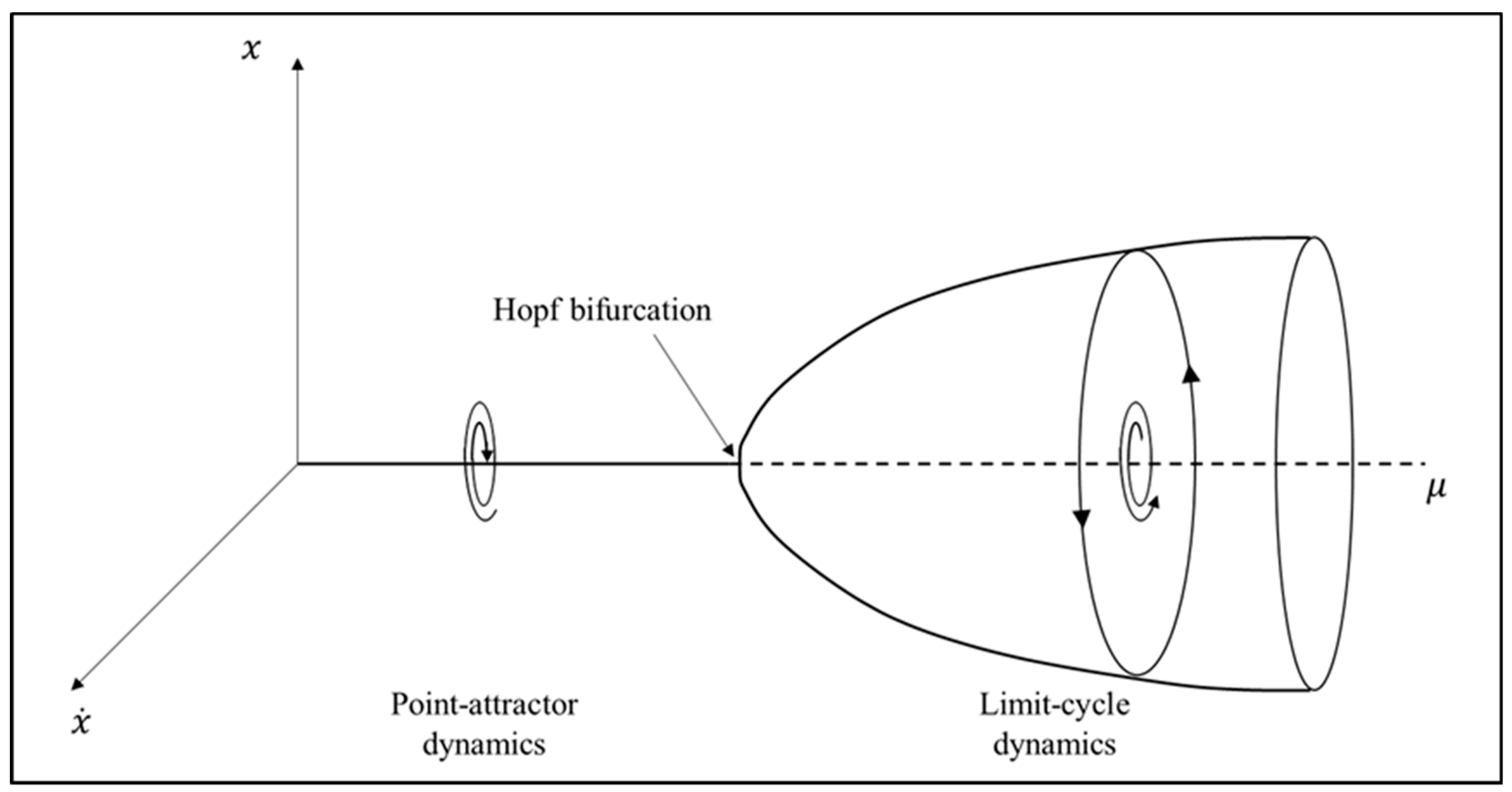
除了相空间中极限环的分岔外,二阶系统中还可以出现另一种类型的分岔,即Hopf 分岔。
- Hopf 分岔:
- 超临界 Hopf 分岔:可以被直观地看作一个极限环从固定点“长出来”。这种类型的分岔发生在因为参数变化而导致稳定点从分类在$\Delta - \tau $图中发生变化(详见第 2.1 节)。
- 超临界 Hopf 分岔:可以被直观地看作一个极限环从固定点“长出来”。这种类型的分岔发生在因为参数变化而导致稳定点从分类在$\Delta - \tau $图中发生变化(详见第 2.1 节)。
2.5 指数理论
庞加莱指数(Index)
- 庞加莱指数介绍:
- 任意闭合的、不相交的曲线 $C$(不穿过任何固定点)的指数,定义为我们逆时针绕曲线 $C$ 一圈时向量场的圈数,可以想象拿着一支笔,逆时针围绕着曲线$C$运动,而笔尖的朝向时刻与向量场中的方向重合,在环绕一圈后,笔尖逆时针转动的圈数就是该曲线的指数(一个有意思的场景,考试的时候大家都在转笔,其实是在计算Index哈哈哈):
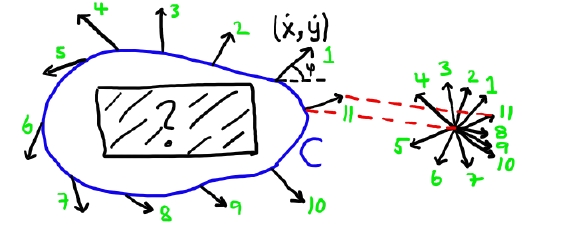
- 我们还可以通过解析方法求解,但需要注意:$\varphi =\text{atan} \left( \frac{\dot{y}}{\dot{x}} \right)$,而不是 $\varphi =\text{atan} \left( \frac{y}{x} \right)$。这种区别在于我们积分的是流方向的角度,而不是坐标本身,这是一个很容易犯的错误!!
$$\varphi = \text{atan} \left( \frac{\dot{y}}{\dot{x}} \right) = \text{atan} \left( \frac{g(x,y)}{f(x,y)} \right)\\ \text{d}\varphi = \frac{\partial \varphi}{\partial f} \text{d}f + \frac{\partial \varphi}{\partial g} \text{d}g = -\frac{g}{f^2 + g^2} \text{d}f + \frac{f}{f^2 + g^2} \text{d}g \\ \Rightarrow I_C \equiv \frac{\Delta \varphi}{2\pi} = \frac{1}{2\pi} \oint_C \text{d}\varphi = \frac{1}{2\pi} \oint_C \frac{f \text{d}g - g \text{d}f}{f^2 + g^2}$$
- 任意闭合的、不相交的曲线 $C$(不穿过任何固定点)的指数,定义为我们逆时针绕曲线 $C$ 一圈时向量场的圈数,可以想象拿着一支笔,逆时针围绕着曲线$C$运动,而笔尖的朝向时刻与向量场中的方向重合,在环绕一圈后,笔尖逆时针转动的圈数就是该曲线的指数(一个有意思的场景,考试的时候大家都在转笔,其实是在计算Index哈哈哈):
- 重要性质:
- 未包含任何固定点的曲线 $C$ 的指数为 $I_C = 0$。
- 将向量场的所有箭头反向($t \to -t$)不改变指数。
- 闭轨道的指数(即曲线 $C$ 和闭轨道重合)为 $I_C = +1$。
- 包围 $N$ 个孤立固定点的曲线 $C$ 的指数为 $I_C = I_1 + I_2 + · · · + I_N$。
- …
结语
这篇博客仅覆盖了动力系统非常非常小的一部分基础内容,这个领域确实很有意思但是也非常有挑战性。为了理解这些概念并准备考试,我花费了大量时间!以后如果有机会在这个领域进一步学习或工作,我希望能够分享下更高级主题的内容,例如混沌、奇异吸引子、分形等等。
Key takeaways
- 一维流:
- 固定点。
- 线性稳定性分析。
- 分岔理论:鞍结分岔、横贯分岔、Pitchfork 分岔。
- 平面上的流:
- 固定点的分类:稳定/不稳定螺旋、稳定/不稳定节点、中心。
- 非局部结构:
- 哈密顿系统中的闭轨道。
- 极限环:极限环的分岔。
- 指数理论。
References
- TIF155 / FIM770 Dynamical Systems Course Lecture Notes, Chalmers University of Technology
- Nonlinear Dynamics and Chaos_ With Applications to Physics, – Steven H_ Strogatz – Studies in Nonlinearity, 2, 2014
☕ Happy learning journey~ 🛠️